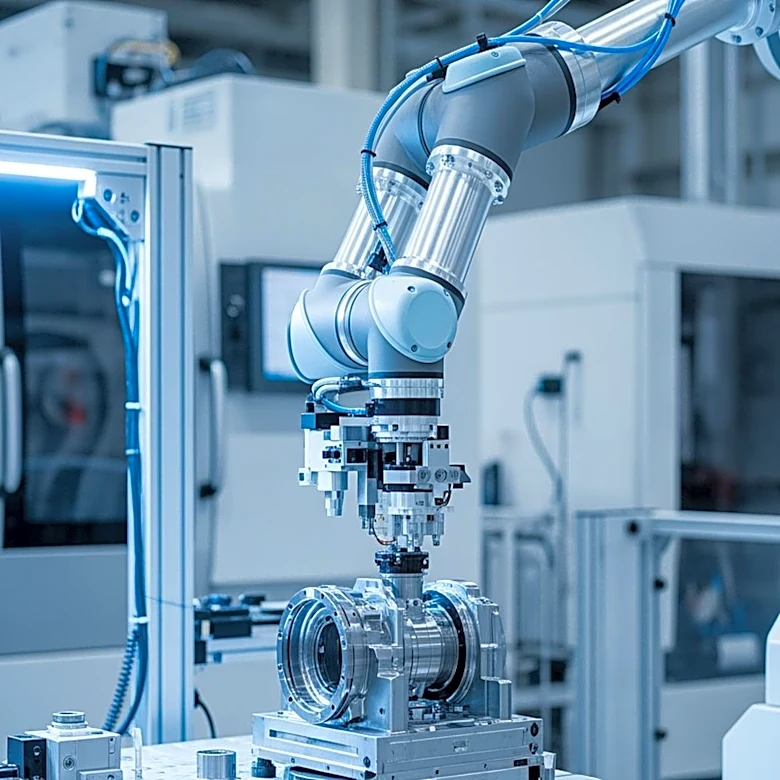
Edge-First Architectures Essential for Real-Time AI in Collaborative Robotics
The article discusses the importance of edge-first architectures in physical AI applications, particularly in collaborative robotics. Traditional cloud-based systems often fall short in real-time safety and throughput on the shop floor due to network latency. The shift towards collaborative robots requires architectures that allow dynamic adaptation to human movements while maintaining safety and efficiency. The solution involves moving AI inference to the edge, creating a low-latency bridge from the edge processor to the robot controller, bypassing legacy PLCs. This approach enables real-time speed and separation monitoring, crucial for maintaining safety in collaborative environments.