









What is the story about?
Robotic arms are often associated with rigid metal structures built for precision and strength. But a team of researchers in Italy is taking a different approach, drawing inspiration from one of nature's most adaptable creatures: the octopus.
Engineers at the Istituto Italiano di Tecnologia in Genoa have created a soft robotic arm equipped with intelligent suction cups capable of sensing contact and responding to their surroundings. The prototype is designed to navigate spaces that are difficult for conventional robots to access, particularly environments where flexibility and gentle handling are essential.
The research, published in Nature Machine Intelligence, represents the latest effort to borrow biological strategies from animals and apply them to next-generation robotics.
Unlike vertebrates, octopuses have no skeletal support in their arms, allowing them to bend, stretch and wrap around objects with remarkable dexterity. Their suckers do more than grip surfaces; they also act as sensory organs that help the animal gather information about its environment.
The team sought to replicate some of those capabilities in an artificial system.
"We have proposed a new version of a continuous soft robotic arm, which is inspired by octopus," said Barbara Mazzolai, associate director for robotics at IIT.
According to Mazzolai, the design was influenced by the way octopuses explore their surroundings through sensor-equipped suckers that help them identify objects and interact with complex environments.
The robotic arm is made from soft materials that allow it to change shape while moving through confined spaces. Researchers say this adaptability enables it to retrieve objects of different sizes and weights while adjusting its behaviour according to the environment around it.
Rather than concentrating sensing functions at the tip of the arm, the team distributed sensing capabilities throughout the structure using multiple artificial suction cups.
At the heart of the design are silicone suction cups fitted with miniature optoelectronic components. Tiny light-emitting diodes and sensors inside each cup monitor subtle changes that occur when the cup touches an object.
When contact is made, the shape of the suction cup deforms slightly, altering how light is reflected within the structure. By analysing those changes, the system can determine whether contact has occurred, identify the direction from which the force is applied and estimate its strength.
"So, we embedded in the artificial suckers of our arm, optical electric sensors," Mazzolai explained. She added that each sucker can detect contact, recognise its direction and measure forces through highly miniaturised electronic systems.
Researchers say the technology works both underwater and in air, making it suitable for a broad range of applications. Because the design is modular, the number and arrangement of suction cups can also be adjusted depending on the task.
The team believes such systems could eventually be deployed in underwater inspection, environmental monitoring, search-and-recovery missions and industrial settings where delicate handling is required.
Another key goal of the project is efficiency. Mazzolai said reducing energy consumption and computational demands remains essential if soft robots are to operate safely for extended periods in real-world environments.
Future development will focus on improving the arm's ability to manipulate a wider variety of objects. As researchers continue refining the technology, the project highlights how lessons from the natural world are helping shape a new generation of machines that are not only more capable, but also more adaptable and sensitive to their surroundings.
Engineers at the Istituto Italiano di Tecnologia in Genoa have created a soft robotic arm equipped with intelligent suction cups capable of sensing contact and responding to their surroundings. The prototype is designed to navigate spaces that are difficult for conventional robots to access, particularly environments where flexibility and gentle handling are essential.
The research, published in Nature Machine Intelligence, represents the latest effort to borrow biological strategies from animals and apply them to next-generation robotics.
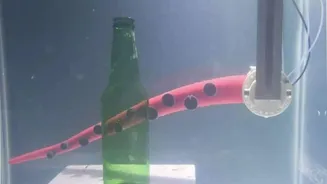
WATCH: An octopus-inspired robotic arm developed by researchers in Italy can feel its way around using artificial suction cups and use that sense of touch to grasp objects underwater pic.twitter.com/4TC31q7JcM
— Reuters Tech News (@ReutersTech) June 23, 2026
Bringing octopus intelligence into robotics
Unlike vertebrates, octopuses have no skeletal support in their arms, allowing them to bend, stretch and wrap around objects with remarkable dexterity. Their suckers do more than grip surfaces; they also act as sensory organs that help the animal gather information about its environment.
The team sought to replicate some of those capabilities in an artificial system.
"We have proposed a new version of a continuous soft robotic arm, which is inspired by octopus," said Barbara Mazzolai, associate director for robotics at IIT.
According to Mazzolai, the design was influenced by the way octopuses explore their surroundings through sensor-equipped suckers that help them identify objects and interact with complex environments.
The robotic arm is made from soft materials that allow it to change shape while moving through confined spaces. Researchers say this adaptability enables it to retrieve objects of different sizes and weights while adjusting its behaviour according to the environment around it.
Rather than concentrating sensing functions at the tip of the arm, the team distributed sensing capabilities throughout the structure using multiple artificial suction cups.
How the sensing system works
At the heart of the design are silicone suction cups fitted with miniature optoelectronic components. Tiny light-emitting diodes and sensors inside each cup monitor subtle changes that occur when the cup touches an object.
When contact is made, the shape of the suction cup deforms slightly, altering how light is reflected within the structure. By analysing those changes, the system can determine whether contact has occurred, identify the direction from which the force is applied and estimate its strength.
"So, we embedded in the artificial suckers of our arm, optical electric sensors," Mazzolai explained. She added that each sucker can detect contact, recognise its direction and measure forces through highly miniaturised electronic systems.
Researchers say the technology works both underwater and in air, making it suitable for a broad range of applications. Because the design is modular, the number and arrangement of suction cups can also be adjusted depending on the task.
The team believes such systems could eventually be deployed in underwater inspection, environmental monitoring, search-and-recovery missions and industrial settings where delicate handling is required.
Another key goal of the project is efficiency. Mazzolai said reducing energy consumption and computational demands remains essential if soft robots are to operate safely for extended periods in real-world environments.
Future development will focus on improving the arm's ability to manipulate a wider variety of objects. As researchers continue refining the technology, the project highlights how lessons from the natural world are helping shape a new generation of machines that are not only more capable, but also more adaptable and sensitive to their surroundings.