






Independent Martian Journeys
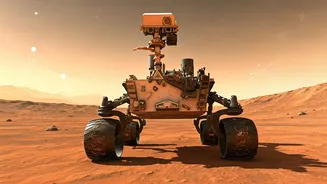
NASA has achieved a significant milestone in robotic space exploration, empowering its Perseverance rover to navigate Mars with AI-driven route planning.
This recent advancement allows the rover to traverse the Martian surface based on routes meticulously crafted by artificial intelligence, without direct, real-time human commands. During a specific test conducted in December, the AI generated a series of waypoints that guided Perseverance through two distinct driving segments, covering a total distance of 456 meters (approximately 1,496 feet). This successful demonstration signifies a leap forward in our capabilities for exploring extraterrestrial environments, enhancing the efficiency of missions, particularly as spacecraft venture further from Earth and experience substantial communication latency. The implications are vast, hinting at a future where robotic explorers can undertake more complex and ambitious tasks with greater autonomy, reducing the constraints imposed by the immense distances involved.
Bridging Earth-Mars Delays
The vast expanse between Earth and Mars presents a unique challenge for mission control: a communication delay of approximately 25 minutes for a round-trip signal. This significant lag renders direct, instantaneous control of rovers impossible, necessitating that these robotic explorers operate with a high degree of self-sufficiency for short durations. Traditionally, mission engineers meticulously analyze images and terrain data transmitted from the rover. Based on this information, they meticulously plot a course, defining waypoints usually spaced no more than 100 meters apart. These navigational instructions are then relayed via NASA’s Deep Space Network to Martian orbiters, which subsequently transmit them to the rover on the surface. However, this latest innovation streamlines the process by delegating a portion of this intricate route planning to an AI system.
AI's Route Selection
The intelligent system employed for route selection meticulously analyzed high-resolution imagery captured by the Mars Reconnaissance Orbiter's HiRISE camera, in conjunction with detailed digital elevation models of the Martian landscape. This comprehensive data analysis enabled the AI to identify potential hazards, including treacherous sand traps, large, obstructive boulders, rugged rocky outcrops, and uneven, difficult terrain. Leveraging technology akin to that found in advanced AI models like Anthropic’s Claude AI, the system then autonomously generated a safe and navigable route. This route was defined by a sequence of waypoints designed to circumvent identified dangers, ensuring the rover's progress would be both efficient and secure. Prior to its deployment on Mars, this novel route-planning system underwent rigorous testing on Earth using a sophisticated "twin" rover, the Vehicle System Test Bed located at NASA’s Jet Propulsion Laboratory. This engineering replica provided a crucial environment to safely simulate and validate the planned routes and autonomous navigation system's responses to potential challenges before transmitting commands to the actual Perseverance rover.
Autonomous Navigation in Action
Once the AI-generated route received the necessary approval, it was transmitted to the Perseverance rover. The rover's advanced auto-navigation system then took over, implementing the planned route as it became active during the drive. A key capability that distinguishes Perseverance from some earlier rovers is its ability to interpret visual information while it is actively moving. This means the rover can process images in real-time as it traverses the Martian terrain, a significant improvement that enhances its situational awareness and maneuverability. This on-the-go image interpretation is crucial for the autonomous system to effectively follow the AI-defined waypoints and react to unforeseen minor obstacles not explicitly accounted for in the initial planning phase, making its journeys more fluid and responsive.
Future of AI Exploration
NASA has been actively developing autonomous navigation capabilities for its rovers for many years, primarily driven by the necessity to overcome communication delays with Earth. Despite these advancements, a current limitation persists: the rover's awareness of its precise location can be less robust. This aspect of positional correction is presently managed from Earth, a process that, while effective, is inherently time-consuming. Researchers are now diligently pursuing methods to integrate AI into this 'relocalisation' operation, aiming to enable the rover to determine its position more accurately and independently. Success in this area could potentially facilitate longer and more ambitious exploratory drives, minimizing the need for human intervention and lengthy waiting periods. Looking ahead, the role of AI in space missions is poised to expand significantly, influencing not only future Mars rovers but also upcoming endeavors like the Dragonfly mission to Saturn's moon Titan. NASA officials emphasize that intelligent systems are likely to become indispensable for establishing and sustaining a human presence beyond Earth, marking a new era of robotic and human exploration.