



What's Happening?
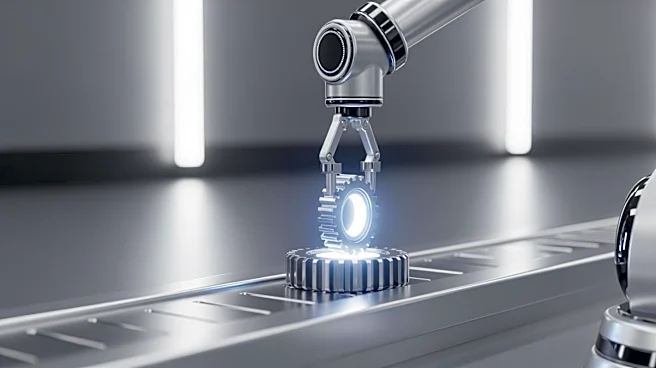
Daimon Robotics, in collaboration with Galbot, has introduced RobOmni, a new benchmark for evaluating tactile perception and dexterous manipulation in robotics. This initiative aims to address the lack of standardized evaluation frameworks in the field
of tactile sensing, which is crucial for robots to interact effectively with the physical world. RobOmni provides a comprehensive platform that includes high-resolution fingertip tactile sensing, wrist-mounted RGB vision, and other sensory inputs to assess robotic performance in contact-rich tasks. The platform is built on NVIDIA Isaac Sim and supports large-scale parallel evaluations, allowing for scalable and rapid validation of robotic capabilities.
Why It's Important?
The introduction of RobOmni is significant as it fills a critical gap in the robotics industry by providing a standardized method to evaluate the impact of tactile sensing. This is essential for advancing embodied AI, where robots need to perform complex tasks that require physical interaction, such as grasping and assembly. By offering a unified framework, RobOmni enables researchers and developers to quantify the value of tactile intelligence, which can lead to more reliable and adaptable robotic systems. This development is poised to accelerate progress in manufacturing, service robotics, and other applications where precise manipulation is required.
What's Next?
RobOmni is set to expand its capabilities by supporting real-robot validation, streamlining the transition from simulation to real-world applications. This will enhance the reproducibility of research and development efforts in robotics. As the platform gains traction, it is expected to drive the convergence of standards for tactile sensing and physical interaction, ultimately leading to more scalable advancements in Physical AI. The industry may see increased collaboration among robotics developers to further refine and adopt these benchmarks, fostering innovation and improving the overall effectiveness of robotic systems.