



What's Happening?
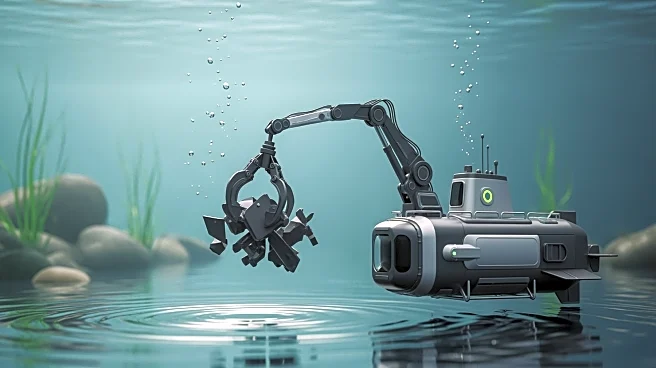
Researchers at the Technical University Munich have developed an unmanned grapple robot designed to remove trash from the seabed. This robotic system includes a surface vessel supporting a miniature ROV equipped with a four-pronged grapple to pick up underwater
debris. The system is autonomous, using AI to identify and retrieve trash, and is capable of lifting over 500 pounds in one hoist. This innovation aims to address the issue of sunken trash in harbors and waterfronts, where pollution is often out of sight but still impacts the ecosystem.
Why It's Important?
The development of an autonomous grapple mini-sub represents a significant advancement in addressing underwater pollution. By automating the process of trash removal, this technology offers a more efficient and cost-effective solution compared to manual cleanup efforts. It has the potential to improve the health of marine ecosystems by reducing the amount of debris on the seabed. Additionally, the use of AI in environmental cleanup highlights the growing role of technology in tackling ecological challenges, paving the way for more sustainable practices in waste management.