

What's Happening?
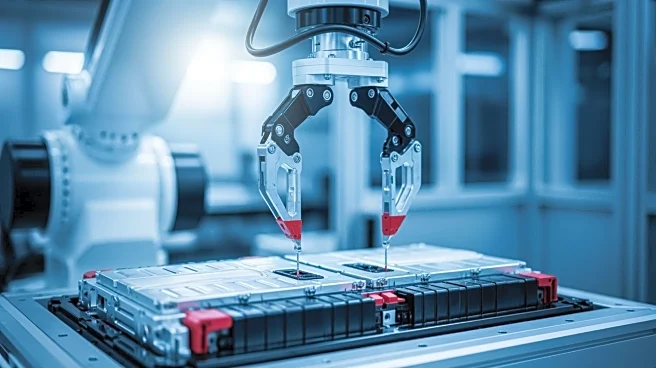
Humanoid robots continue to advance in locomotion, with capabilities such as walking, running, and jumping. However, dexterous manipulation remains a significant challenge. Human hands possess complex attributes like strength, tactile feedback, and rapid
reflexive adjustment, which robots struggle to replicate. The lack of standardized tactile data and the complexity of touch sensing contribute to the difficulty in developing robotic hands that can operate reliably in unstructured environments. Despite progress in locomotion, the ability to interact with objects safely and effectively is a major hurdle for humanoid robots.
Why It's Important?
The development of humanoid robots capable of dexterous manipulation has implications for various industries, including manufacturing, healthcare, and service sectors. Achieving reliable manipulation would enable robots to perform a wide range of tasks, potentially transforming workplaces and homes. However, the technical challenges involved mean that general-purpose humanoid robots are still far from being commercially viable. The focus remains on specialized robots that perform specific tasks in controlled environments, highlighting the complexity of achieving human-like dexterity in robotics.