



What's Happening?
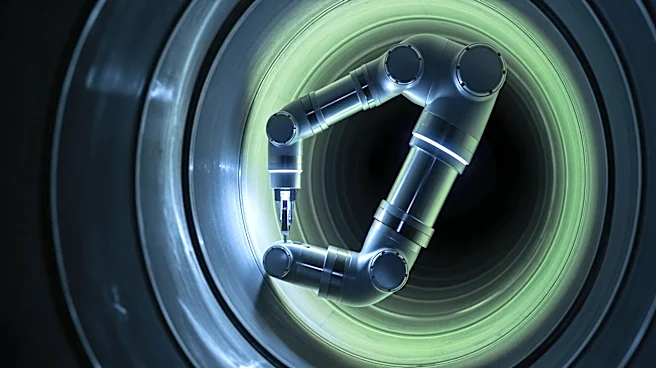
Researchers have developed a soft robot named SPPIRO, capable of navigating complex pipeline networks. This robot uses pneumatic origami actuators, proprioceptive sensing, and adaptive anchoring to maneuver through bends, T-junctions, and variable pipe widths.
SPPIRO is designed for untethered pipeline inspection tasks, mapping the surrounding geometry in real-time. The robot's design allows it to handle sharp turns and adapt to different pipe diameters, overcoming challenges that conventional inspection machines face. The development of SPPIRO marks a significant advancement in pipeline inspection technology, offering a solution to the limitations of existing rigid-bodied and tethered robots.
Why It's Important?
The introduction of SPPIRO represents a breakthrough in the field of pipeline inspection, addressing the limitations of traditional inspection robots. By providing a more flexible and adaptable solution, SPPIRO can improve the efficiency and accuracy of pipeline inspections, reducing the risk of undetected leaks and associated damages. This technology has the potential to enhance safety and reduce maintenance costs in industries reliant on extensive pipeline networks, such as oil, gas, and water utilities. The ability to navigate complex pipeline environments autonomously could lead to broader applications and further innovations in robotic inspection technologies.
What's Next?
The successful deployment of SPPIRO in real-world pipeline networks could pave the way for its adoption across various industries. Future developments may focus on enhancing the robot's capabilities, such as improving its speed and navigation accuracy. Additionally, researchers may explore integrating SPPIRO with other technologies, such as simultaneous localization and mapping (SLAM), to further enhance its inspection capabilities. As the technology matures, it could lead to the development of new robotic solutions for other challenging environments, expanding the scope of autonomous inspection technologies.