
What's Happening?
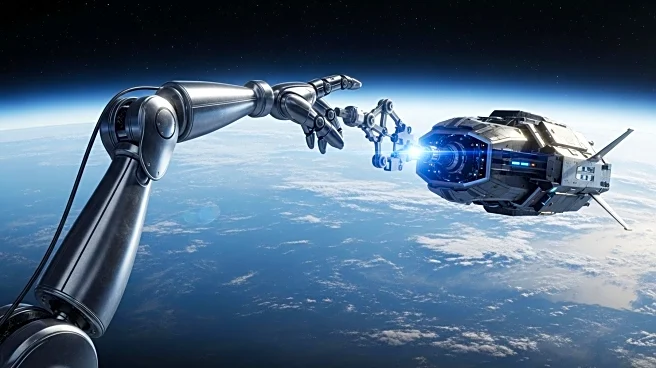
The International Space Station's robotic arm, Canadarm2, successfully captured and installed Northrop Grumman's Cygnus XL cargo ship. The operation, conducted by astronaut Jonny Kim, involved maneuvering the Cygnus XL into position at the ISS's Unity module. The cargo ship, launched from Cape Canaveral, delivered over 11,000 pounds of scientific supplies and will remain docked until March 2026. Canadarm2, a key component of the ISS's Mobile Servicing System, demonstrated its capabilities in handling large payloads and repositioning itself for optimal operation.
Why It's Important?
This successful maneuver highlights the critical role of robotics in space exploration and station maintenance. Canadarm2's ability to handle complex tasks in extreme environments showcases advancements in robotic technology, which are essential for future missions. The delivery of scientific supplies supports ongoing research aboard the ISS, contributing to advancements in various fields such as semiconductor growth, pharmaceutical crystallization, and cryogenic fuel management.
What's Next?
Cygnus XL will remain docked at the ISS, supporting scientific experiments and research until its scheduled departure in March 2026. The ongoing use of Canadarm2 for station operations will continue to be vital for the maintenance and functionality of the ISS. Future missions may further explore the capabilities of robotic systems in space, potentially leading to innovations in automation and remote operations.
Beyond the Headlines
The operation underscores the importance of international collaboration in space exploration, with Canadarm2 representing Canadian contributions to the ISS. It also highlights the potential for robotics to play a significant role in future missions beyond Earth, including lunar and Martian exploration.